I am Geir Hovland, founder of IRBCAM. I am a robotics engineer and professor having worked with industrial robots in both industry and academia since the mid 1990s. In relation to the relaunch of IRBCAM in 2024, I wanted to share a brief history of IRBCAM.

Back in the early 2000s, in Switzerland, a team lead by Guido Meier* had a project where the wooden core of a snowboard was milled using an ABB IRB6400. This inspired me to experiment with creating robot programs for milling and sparked the development of what became the first version of the IRBCAM software in 2005.
The motivation to build IRBCAM was to bridge a gap in the market for easy, reliable, and affordable programming of robots. The initial competitive advantage of IRBCAM was the ability to load 5-axis toolpaths directly from CAD/CAM software using the APT file format. This way the need for programming skills and cumbersome use of the robot teach pendant was eliminated.

Screenshot from the orignal IRBCAM software
For almost two decades, the IRBCAM user community has served as an invaluable source of feedback and inspiration, and the software has been developed largely based on needs and feature requests from the users. A very big thank you to all the IRBCAM users for being a part of this!
To maintain our current user community and to keep up with market developments we decided to make a big investment in a makeover of IRBCAM. In addition to a complete technical reimplementation, we also transitioned to a subscription based offering. Our aim is to lower the barriers in terms of investments and skills needed to make use of robots.The as-a-service paradigm also means that IRBCAM is always available and accessible, being it from work, home, your old computer, or your new computer.
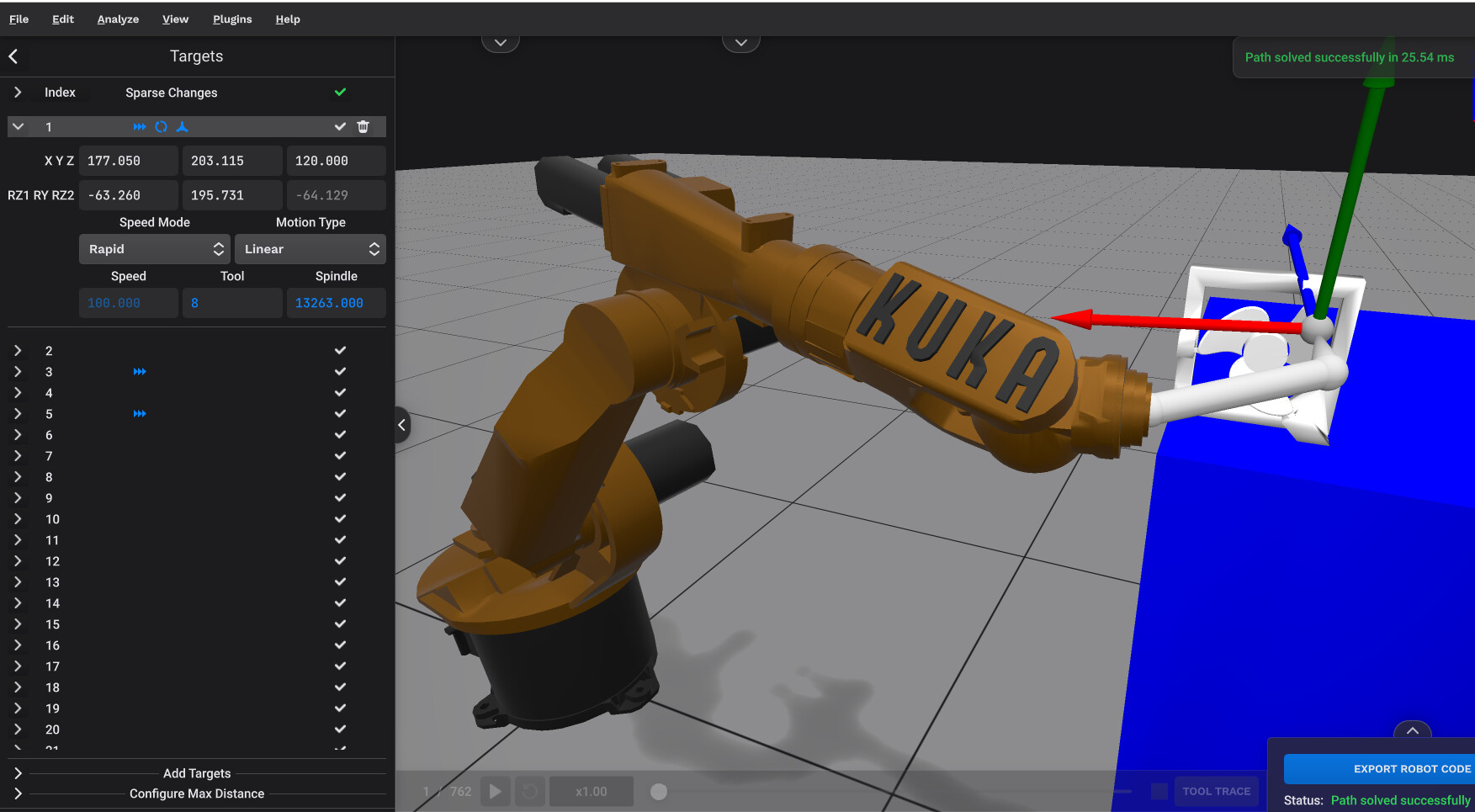
The work on the new online IRBCAM commenced in mid 2022. In June 2024 we did a soft launch and in September we launched publically. This was a significant milestone for us and marked a new chapter in the history of IRBCAM. Below is a screenshot from the online version of IRBCAM:
IRBCAM is now an integral part of Hokarob AS, a company I founded in 2019. We are based in Grimstad, in the southern part of Norway. Hokarob is a thriving company with 9 highly skilled employees.
At Hokarob we use our mechatronics and robotics experience and expertise to complement IRBCAM with hardware offerings. The first hardware product to be launched is a rotary table fully integrated with IRBCAM. It can be used with multiple robot OEMs, including older robot controllers.
*Sadly Guido unexpectedly passed away in May 2024.