When discussing the accuracy of a robot or a CNC machine, it is useful to distinguish between accuracy and repeatability. Sometimes, these words are used interchangeably. For example, in a datasheet for an industrial robot, the word accuracy sometimes means repeatability and the term “absolute accuracy” is used instead of accuracy.
To avoid any confusion, we define accuracy and repeatability as illustrated below:
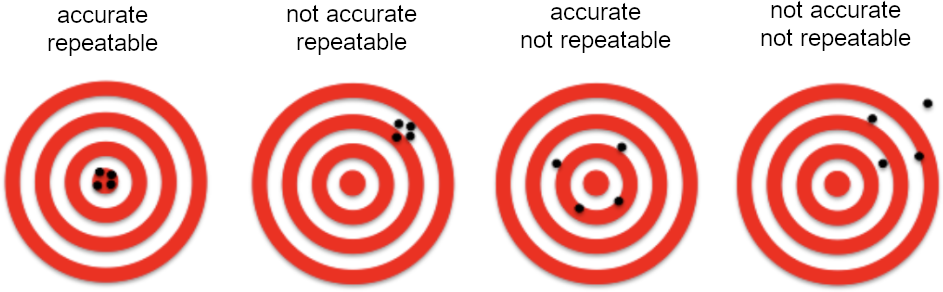
In this illustration, the center of the target above is the programmed position while the black dots are the actual positions of the robot when moved to the target position four times.
When a robot or a CNC machine is accurate, it means that the actual position of the machine is close to the programmed position. If the machine is repeatable, it means that the spread of the four black dots is low. As seen in the second example above, a machine can be repeatable but not accurate.
The repeatability of a robot manipulator is influenced by several key factors, such as:
-
Mechanical Design and Precision: The quality of the manipulator’s mechanical components, such as joints, gears, and bearings, plays a significant role. Wear, backlash (play between mechanical parts), and tolerances in manufacturing can introduce small deviations that affect repeatability. Rigidity of the structure is also critical; flexing or deformation under load can lead to inconsistencies.
-
Control System Accuracy: The precision of the control algorithms and feedback systems (e.g., encoders, sensors) determines how well the robot can correct its position. Errors in sensor resolution or calibration can reduce repeatability. The quality of the servo motors or actuators, including their response time and stability, is equally important.
-
Kinematic Configuration: The robot’s kinematic chain (e.g., serial vs. parallel structure) and the number of degrees of freedom impact repeatability. Complex configurations may amplify small errors at each joint. Joint wear or misalignment over time can compound these effects.
-
Maintenance and Wear: Over time, mechanical wear in joints, belts, or gears can degrade repeatability. Regular maintenance, such as lubrication and part replacement, is essential to maintain performance.
Repeatability depends on various factors such as hardware quality, control precision and operational conditions.
Accuray (or absolute accuracy) on the other hand, is a measure of how well the manipulator’s real-world behavior matches its theoretical model. The mathematical model used to calculate the manipulator’s position (forward and inverse kinematics) assumes ideal geometry. In reality, deviations from this ideal (e.g., non-perfectly parallel axes or slight bends in links) lead to inaccuracies. Errors in Denavit-Hartenberg parameters or other kinematic representations compound these issues. Environmental conditions such as temperature fluctuations can cause thermal expansion or contraction of components, subtly altering their positions or dimensions.
In practice, a large, heavy-duty industrial robot often comes with a specification for the repeatability of typically ±0.1 mm. Smaller robot arms optimized for repeatability claim a repeatability of ±0.02 mm, by careful selection of mechanical components, high quality sensors and actuators and a well-tuned and calibrated control system.
A high-end CNC machine typically achieves repeatability in the range of ±0.002 mm to ±0.01 mm (or roughly ±0.0001 to ±0.0004 inches), though this can vary based on the machine type, manufacturer, and application. This level of precision is tighter than most industrial robots because CNC machines are built for absolute accuracy in cutting, milling, or turning, often working with rigid setups and fixed workpieces. This level of repeatability is achieved through a focus on: linear motion systems, thermal stabilty (including cooling systems), feedback control using ultra-precise encoders, spindle precision and build quality.
The typical absolute accuracy of an industrial robot ranges from ±0.1 mm to ±1.0 mm, though this varies widely depending on the robot’s design, calibration, and intended use. In the low range of this estimate (±0.1mm), individual calibration of a robot’s kinematic parameters is usually required, specific for each robot individual, using a 3D sensor such as a laser tracker or a camera system.
The typical absolute accuracy of a high-end CNC machine ranges from ±0.005 mm to ±0.02 mm (approximately ±0.0002 to ±0.0008 inches), though top-tier models can push this down to ±0.001 mm to ±0.003 mm under ideal conditions.
When making a purchase decision regarding an industrial robot or CNC machine, the accuracy and repeatability requirements given by the intended application should be checked against the manufacturers datasheets.