Robot Stiffness
If the goal is to use a robot to machine medium and hard materials, the rigidity / stiffness of the machine/robot becomes important to avoid vibrations in the arm structure or chattering of the tool when machining at high speeds or with high contact forces.
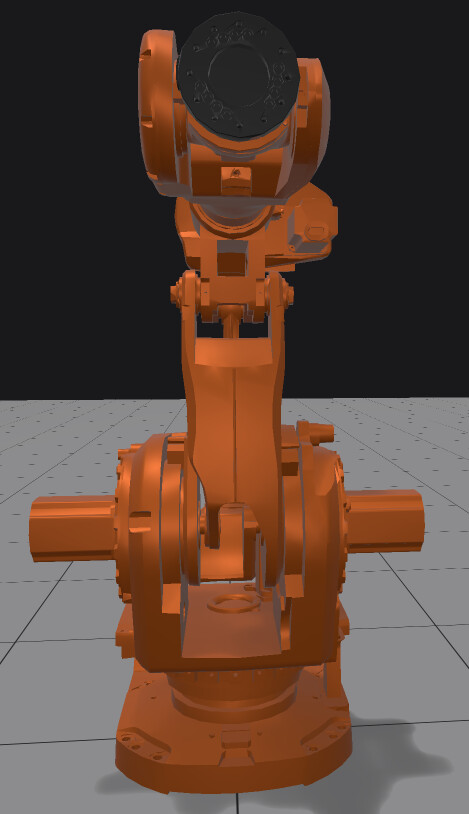
Some industrial robots are specifically designed and constructed with higher rigidity / stiffness to be used in machining operations. Below (left) is an image of an industrial robot with support bearings on both sides of axes 2 and 3, to increase the rigidity / stiffness.
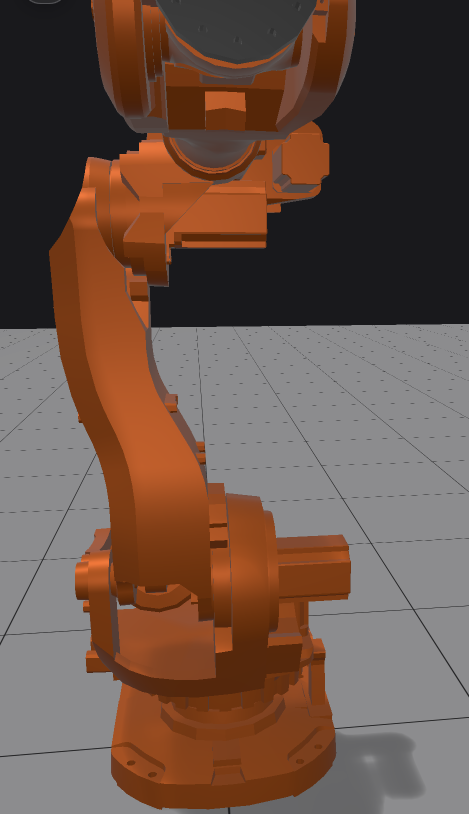
The industrial robot design on the right has support bearings on only one side of axes 2 and 3. Such designs have lower rigidity / stiffness and may work well for machining in softer materials, and for operations with no or low contact forces such as gluing, welding and cutting.
In the paper [1] (references at the end) it was concluded:
Not considering the stiffness of components such as a workpiece, work holding or tool, the following stiffness was measured. Lowest stiffness of the 3-axis CNC was measured to be between 14.8 N/μm and 21.1 N/μm in the xy-plane and 24.7 N/μm in the z direction. The 2-axis trunnion was measured to be as low as 7.4 N/μm xy-plane (relative to the 3-axis machine) and as high as 68.8 N/μm in the z-direction. 5-axis stiffness, with the combination of the trunnion and the CNC was approximated to be from 5.3 N/μm to 16.9 N/μm. The 6-DOF industrial robot was measured to have a stiffness between 0.25 N/μm and 1.10 N/μm.
As found in this reference, the stiffness of a traditional CNC machine is higher than of a typical industrial robot. However, when a 3-axis CNC machine is extended by a 2-axis trunnion to achieve 5-degrees-of-freedom, the combined stiffness of the CNC is also significantly reduced. As a conclusion, typical industrial robots are not suited for machining operations with high contact forces, since these will result in large deflections of the tool. As an example, a contact force of 500N and a robot with a stiffness of 1N/μm, will result in a deflection of 500μm or 0.5mm, which will be a too large error in many applications. However, industrial robots can be well suited for machining in softer materials, such as foam, wood, plastics and even soft metals such as aluminium, where the contact forces are lower.
References
[1] Jan Fredrik Røsjordet and Geir Hovland, "Methods for Experimentally Determining Stiffness of a Multi-Axis Machining Centre", Vol 40, No 1, pp. 11-25, ISSN 1890-1328 (2019)