In this video the turntable Dynamic Angle 2 mode is demonstrated. The steps demonstrated are as follows:
- Load a robot into an empty station
- Attach a spindle tool on the robot
- Import a turntable into the station and position it
- Create a 2m x 2m plate and attach it to the turntable
- Manually create target points in each of the 4 corners of the plate
- Interpolate the path using the Maximum Distance tool
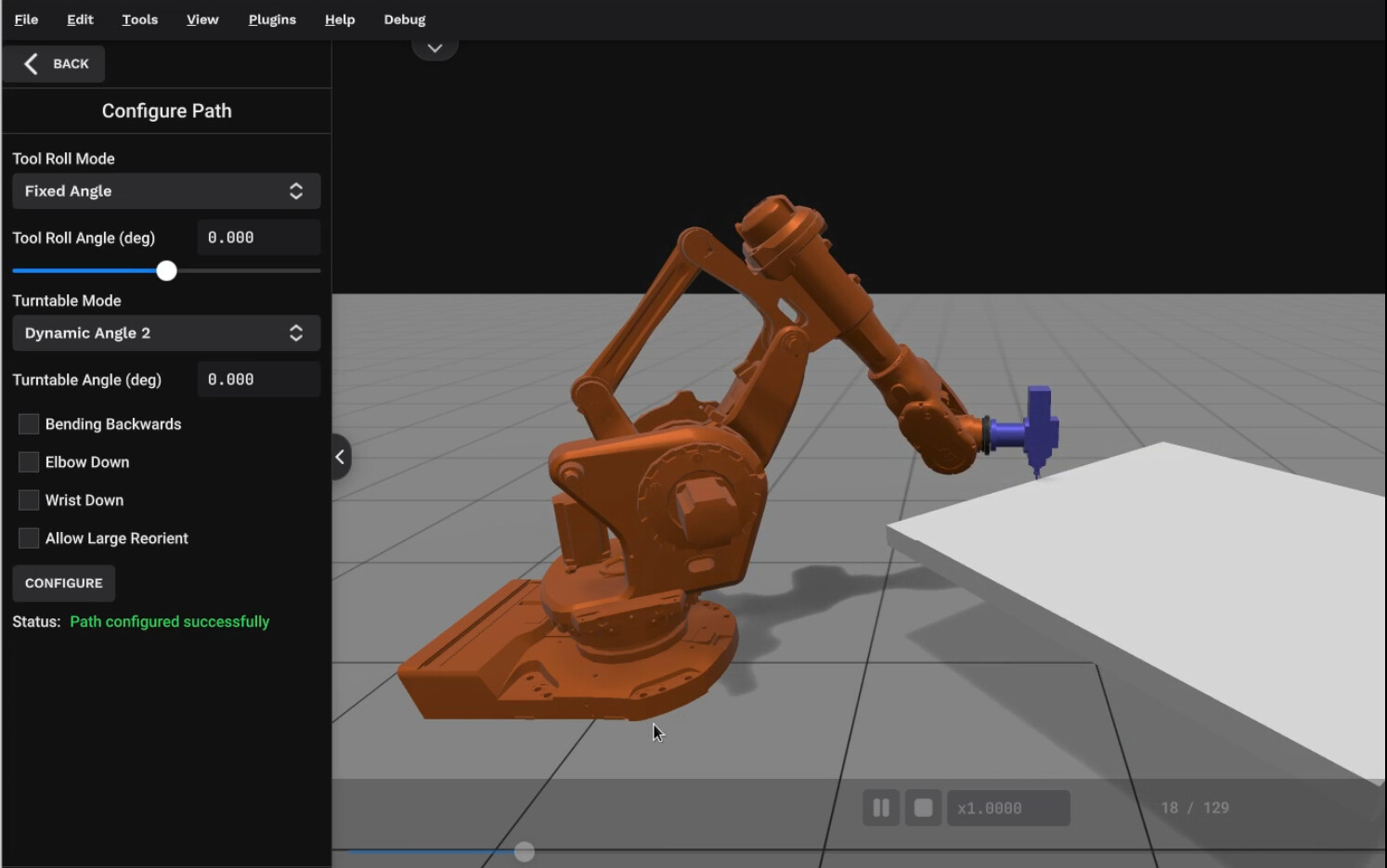
- Configure the toolpath using the Dynamic Angle 2 mode of the turntable for horizontal objects
- Simulate the configured toolpath
- Finally, generate robot code which can run on the real physical controller.