The two files (STL and APT) which you need to repeat this tutorial yourself are available in the ZIP file at the bottom of this post.
The steps demonstrated in this tutorial are:
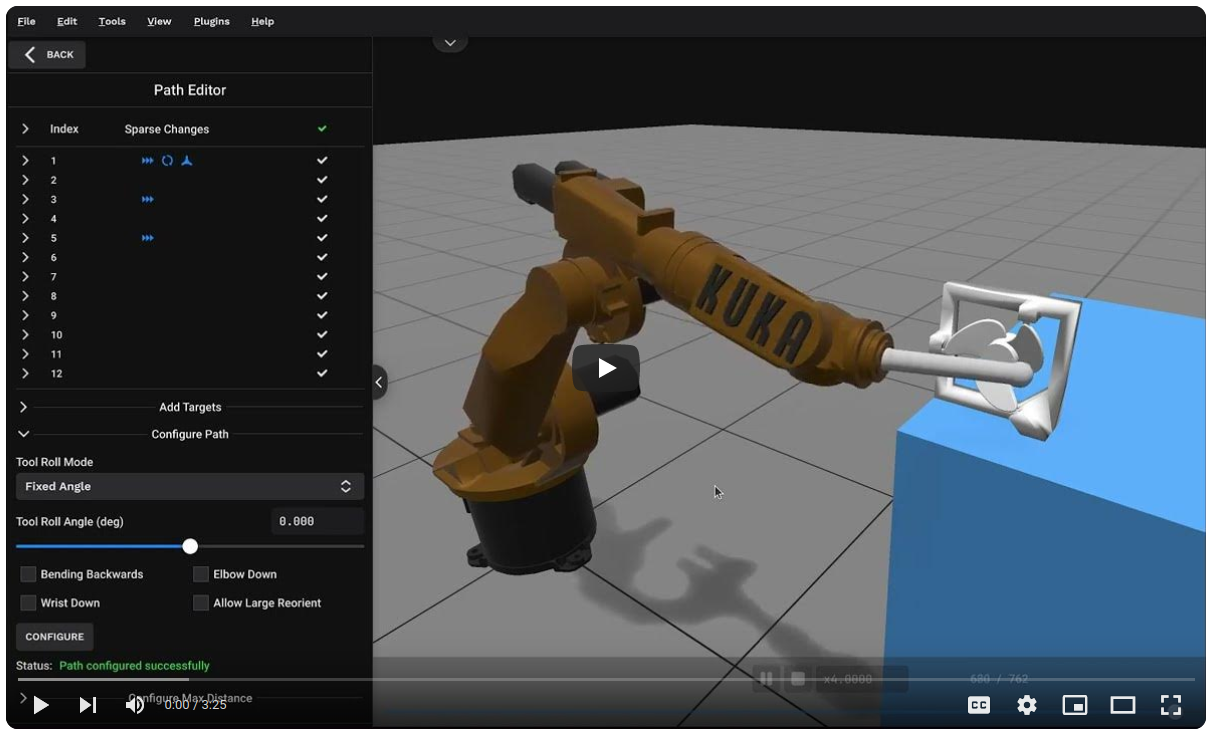
- Load a KUKA robot into an empty station
- Attach a generic tool to the robot and edit the tooldata
- Insert a Cuboid into the station, representing a stationary machining table
- Define the user frame of the station located on top of the machining table
- Edit the user frame parameters including the positions X,Y,Z and the rotation RX
- Load the STL file into the station, representing a propeller blade
- Edit the object frame Z parameters = 50mm
- Import the APT file into the station
- Configure (Solve) the path using the method “Fixed Angle”
- Generic robot code for the KUKA controller on the SRC format
The approach in this tutorial was used to mill the propeller in foam material as shown in the photo below:
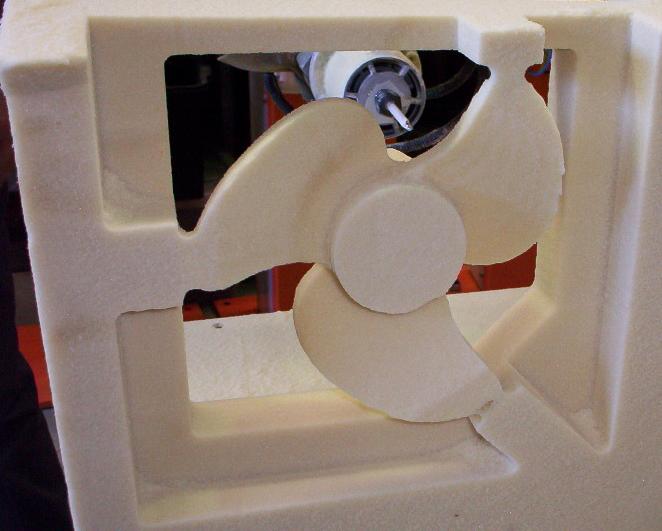
propeller_files.zip (604.6 KB)