When calibrating the tool of an industrial robot using the 4-point method, a sharp calibration tool can be used. Ideally, this calibration tool has a sharp point which you can position in your working cell. When using the 4-point method, you position the tool center point (TCP) of the robot as accurately as you can against the sharp calibration tool, using different orientations. Examples of 4 such positions and orientations are shown in the photos below:




Mathematically, only 3 different positions and orientations are needed to calculate the TCP. However, when 4 points and orientations are used, error estimates can be calculated and displayed on the teach pendant as shown below:
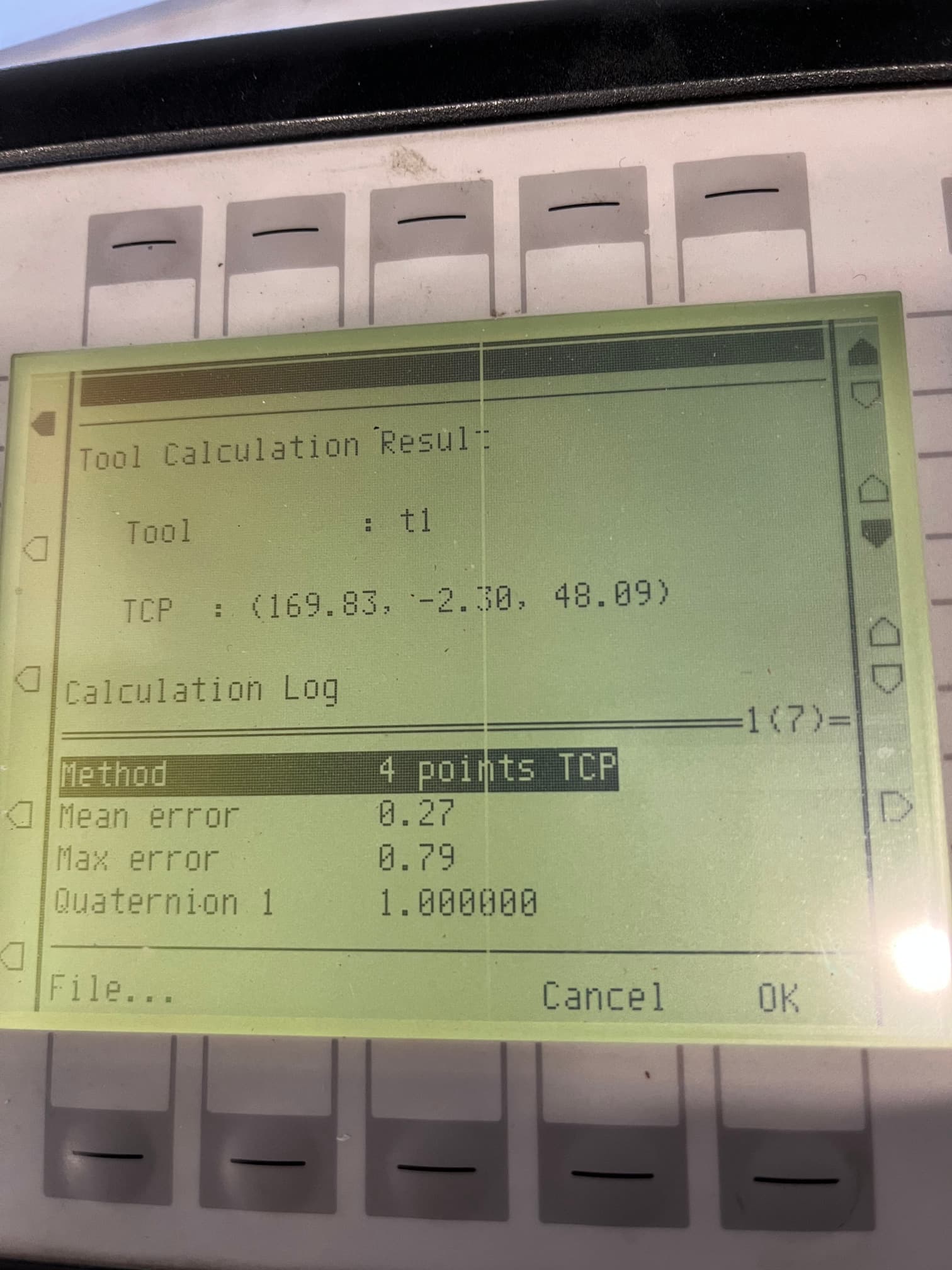
In this photo, we can see that the tool X,Y,Z parameters are found to be (169.83, -2.30, 48.09) in millimeters. The estimated errors are 0.27mm (mean) and 0.79mm (max).
After this first iteration, we have a fairly accurate TCP definition which makes it much easier and faster to move and reorient the robot in the tool frame and position it relative to the sharp calibration tool. Hence, by repeating the tool calibration iteratively, it is usually possible to improve the tool calibration.
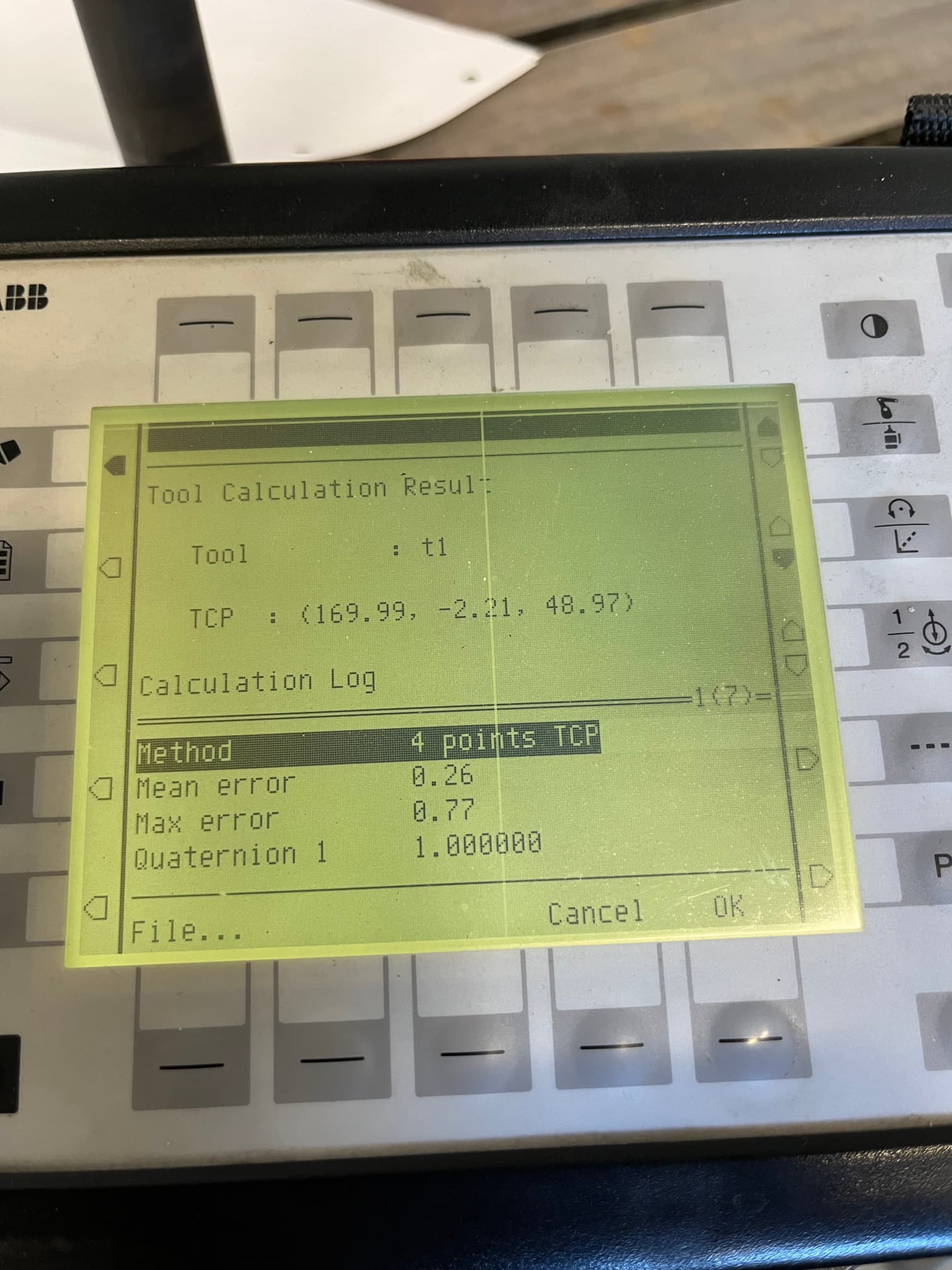
In this example we found new tool parameters to be (169.99, -2.21, 48.97) millimeters with error estimates found to be 0.26mm (mean) and 0.77mm (max). If you happen to get worse results compared to the previous iteration, you can just discard the result and try again.
The results above are only slightly better compared to the first iteration. Hence, we repeat the tool calibration a third time.
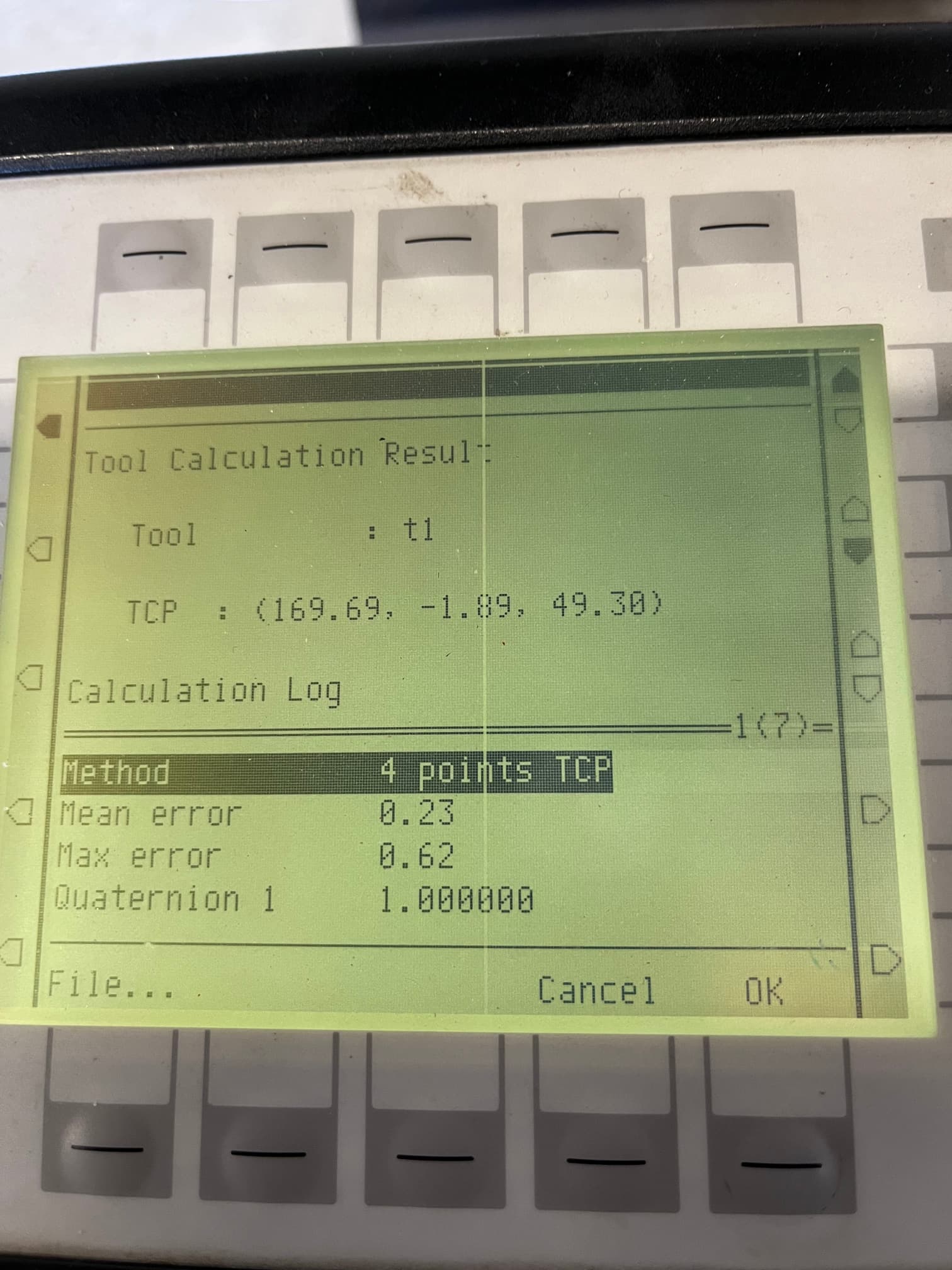
This time we got tool parameters (169.69, -1.89, 49.30) millimeters and error estimates of 0.23mm (mean) and 0.62mm (max).
We are still not happy with the result, and iterate one more time. The final result is shown below:
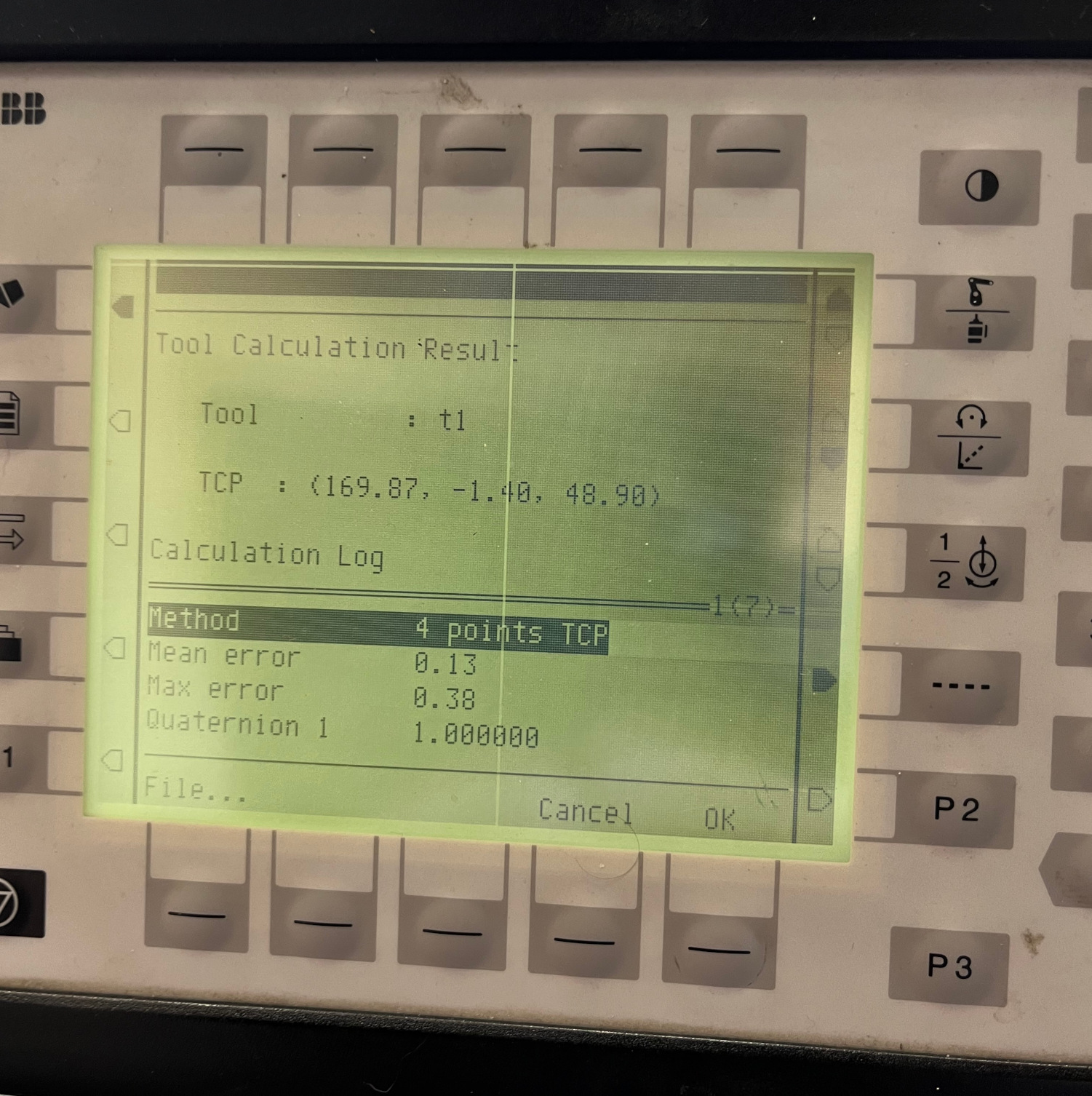
This time we are satisfied with the result. The mean error is 0.13mm while the maximum error is 0.38mm. Getting much better results than this is difficult, since we are approaching the repeatability capabilities of the robot. This forum post shows how it is possible to achieve a very good calibration of a robot’s tool by following an iterative approach. Once a fairly accurate tool frame has been achieved (after the first or the second iteration), the operator can change the frame in which the robot is jogged (from world frame to tool frame) which makes it easier to reorient and position the tool center point and hence make new iterations faster.