In this tutorial it will be demonstrated how to use an ABB IRB6640 robot and a linear track motion to machine a large rectangular shape.
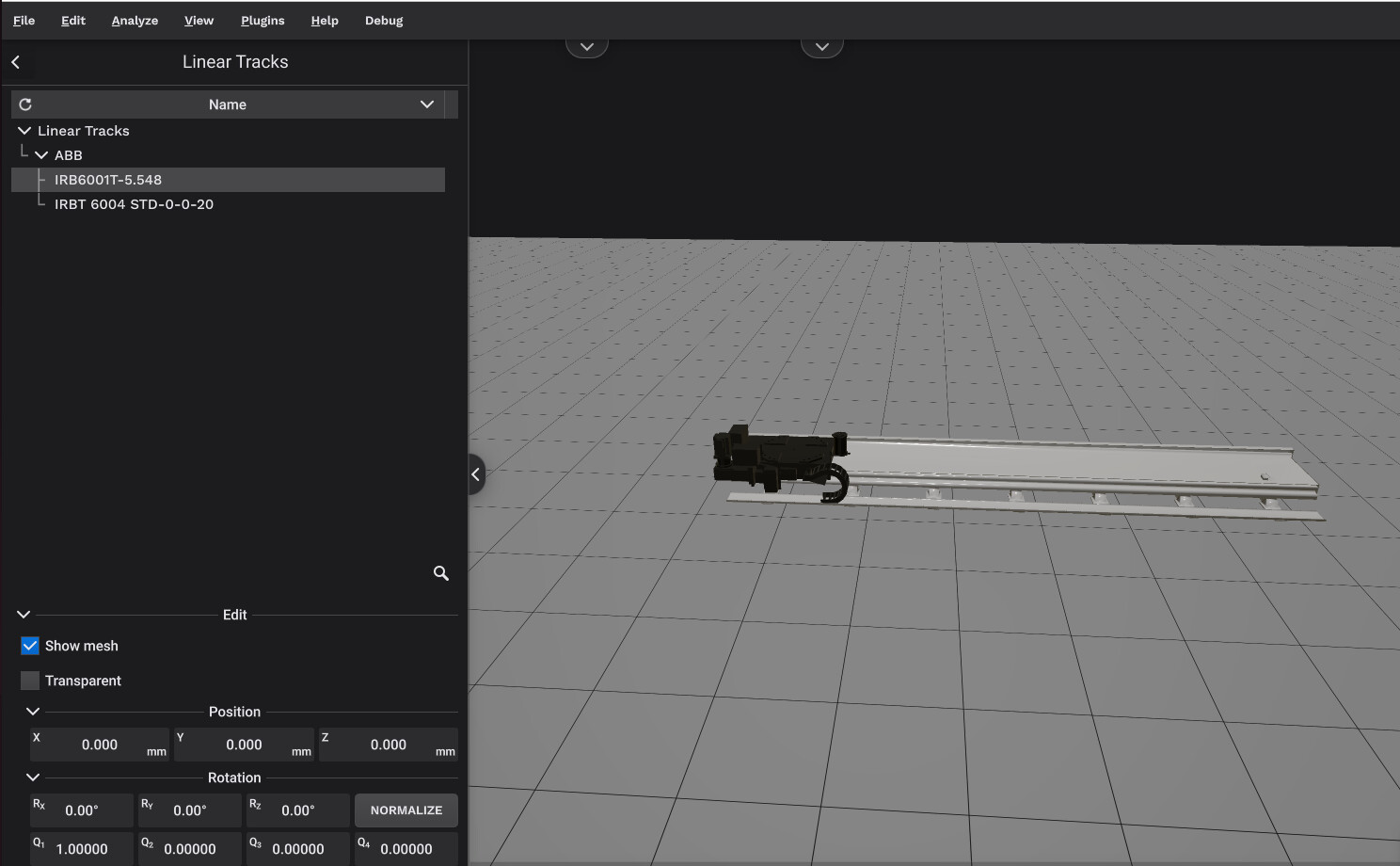
First, load the linear track IRBT 6001T-5.548 into an empty project as shown below.
Next, load an ABB IRB6640-2.55-180 robot into the project using the spindle ELTE - TMA4. Define the user frame at X=1800, Y=-1300, Z=500 and RZ=-90. Create an Edit - Additional Objects- Cuboid to represent a machining table as shown below:
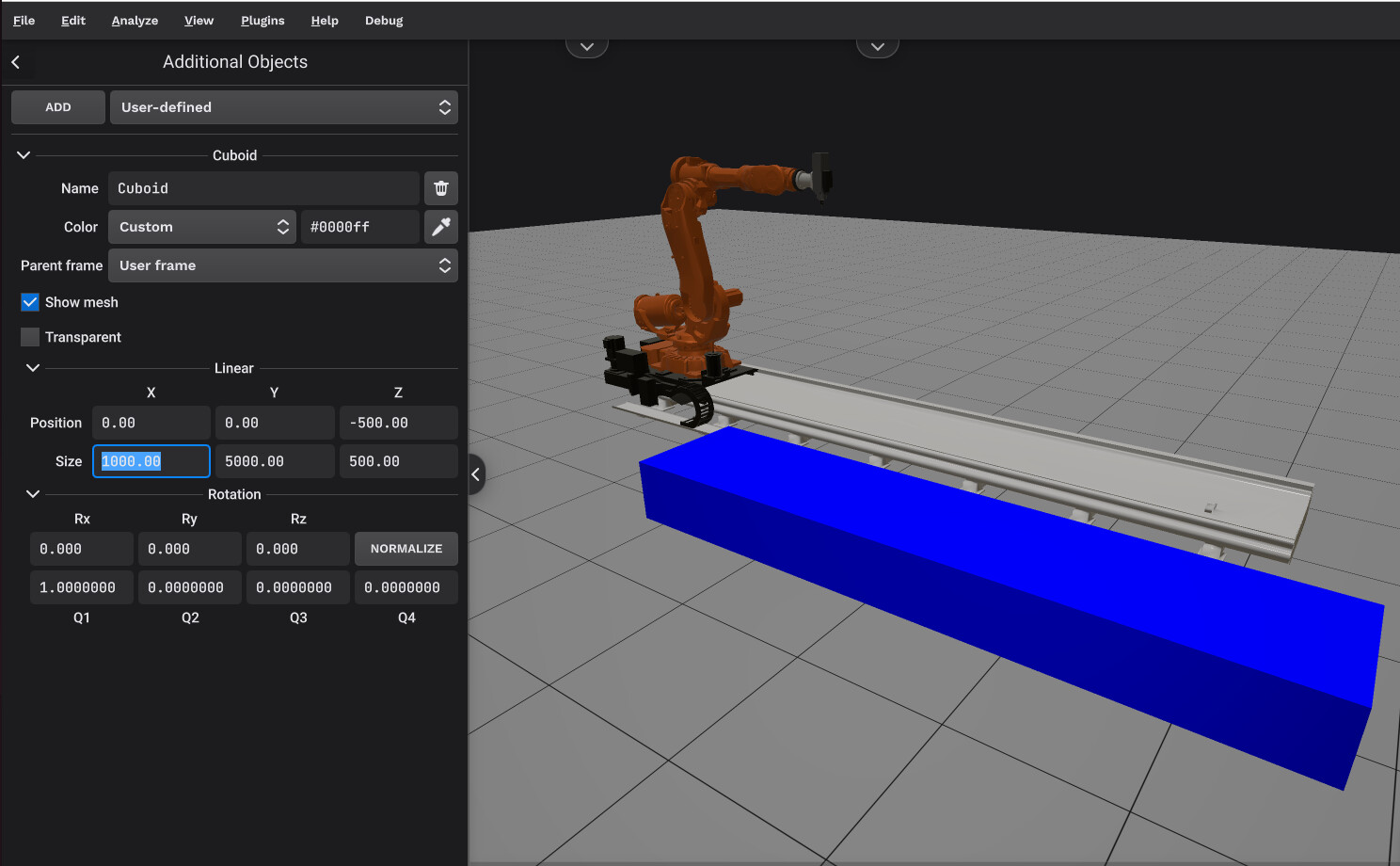
The cuboid is attached to the user frame and the size is X=1000, Y=5000, Z=500. The Z-position of the cuboid is Z = -500.
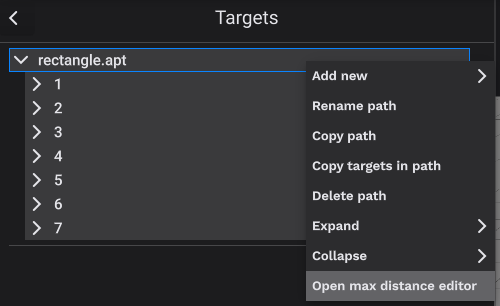
Next, import the APT file rectangle.apt available for download at the bottom of this tutorial. Right-click on the group rectangle.apt in the target editor and select “Open max distance editor”.
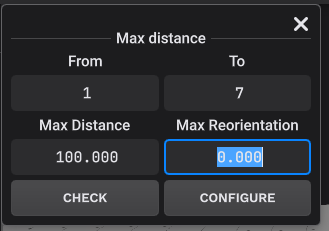
Set the maximum distance to 100. Click on CONFIGURE. The number of targets should now have increased from 7 to 123.
Next, click on SOLVE PATH and define the parameters as shown below:
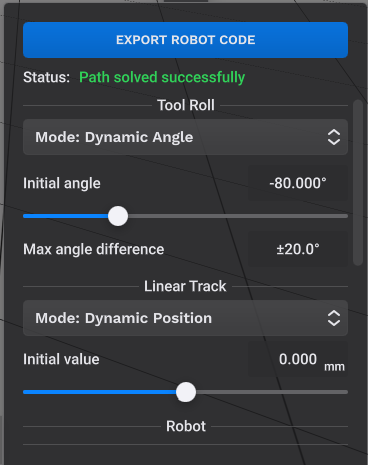
With these settings the entire path should be configured. Note that IRBCAM starts with a tool roll angle (RZ2) of -80 degrees and ends with RZ2 = -82. Without this modification of RZ2 in the middle of the path (from target 61 to 62) the robot would not be able to reach all the targets. IRBCAM uses the 6th degree of freedom of the robot to extend it’s reach. Output from CAM software contains a maximum of 5 axis information, while IRBCAM adds the required data for additional degrees of freedom.
When the path is solved successfully, the final robot code (RAPID language for ABB) can be generated.
A movie of the simulation is shown below. Note that initially the linear track moves while the robot is standing still. When the track reaches the axis limit, the robot takes over. When the robot can no longer reach the target with the current value of the tool roll, the dynamic mode of the tool roll makes it possible for the robot to reach all targets. This example illustrates some of the strengths of IRBCAM to solve complex paths without the end-user having to modify individual targets one-by-one.
rectangle.zip (239 Bytes)