On older ABB robot controllers the memory is limited to approximately 24,000 lines of RAPID code. If you have more targets than this in your IRBCAM toolpath, the program can be split into several modules (*.MOD files) and loaded with a DYNLOAD.PRG main program automatically generated by IRBCAM.
Select “File - Export Robot Code” and the following options will be able if you have an ABB robot in your station.
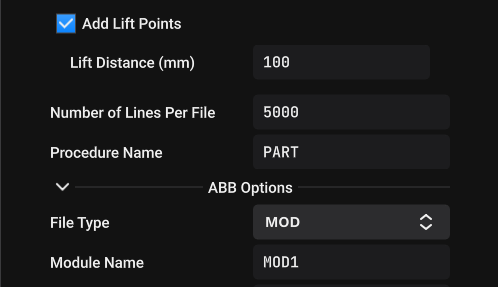
Here you can define the number of lines per (*.MOD) file and define the procedure names (in this example the procedures will become PART0, PART1, PART2, etc). IRBCAM will automatically generate a DYNLOAD.PRG main program which will load the generated modules, call the next procedure and unload the module from memory one by one until the entire toolpath is executed.
If the option “Add Lift Points” is selected, IRBCAM will automatically insert lift points at the end of each module with the desired lift distance in the tool direction. These lift points can be useful to avoid that a milling tool damages the part when the robot stops for a short time period while loading the next module.
In order to execute DYNLOAD.PRG on your robot controller, all the files need to be placed in the directory /hd0a/IRBCAM on the robot controller’s flash disk.